简介
车辆调度问题,英文是 Vehicle Routing Problem,简称 VRP,一般翻译成车辆路径问题。主要解决物流公司的痛点,怎么用最小成本把仓库的货物分发到各个站点。
本文先介绍 VRP 的问题定义和问题分析,然后是解法,包括精确解和近似解,最后介绍实现这些解法的相关工具。
问题定义
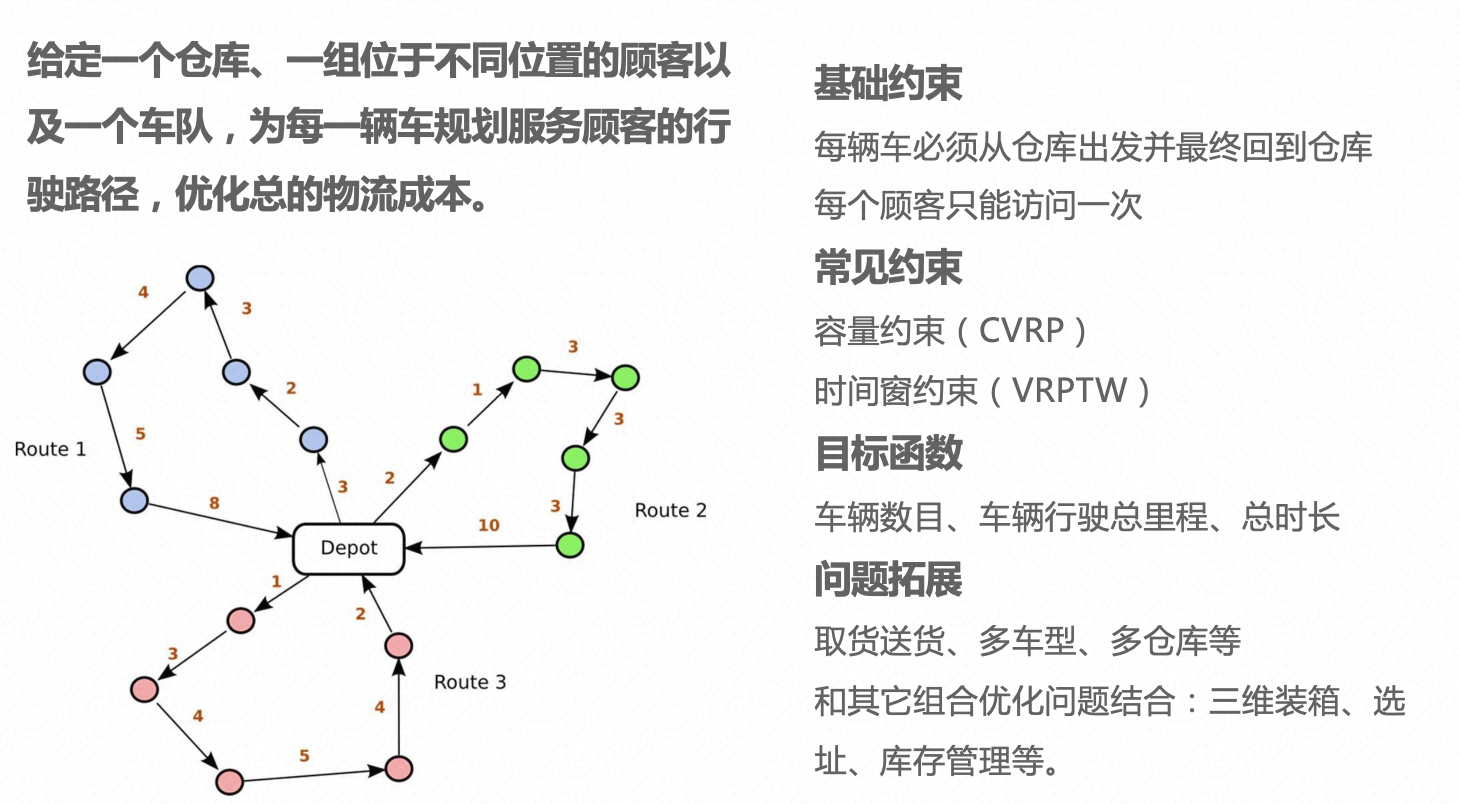
VRP 的定义,给定一个仓库,一组位于不同位置的顾客以及一个车队,要为每一辆车规划服务顾客的行驶路径,优化总的物流成本。即以最小的物流成本,把仓库中的物品分发给各个顾客。
VRP 一般模型的基础约束包括,每辆车必须从仓库出发并最终回到仓库,每个顾客只能访问一次,有且仅有一次。最常见的约束是容量约束和时间窗约束,容量约束是对车辆的运输能力进行限制,也是现在默认的 VRP,时间窗约束是对服务顾客的时间进行限制,即对每个顾客,车辆必须在其指定的时间段内到达,比如有些货需要赶飞机、赶火车,就必须在指定时间段到达,通常考虑硬时窗,即晚到不能进行服务,也有软时窗,也就是超时可以服务,但会导致总成本增加。
优化的目标有用车最少、车辆行驶总里程最少、耗时最少。一般公开数据集的评价标准是,先看用车数目,用车最少的得分最高,用车相同的情况下看行驶总里程,里程少的方案获胜。工程实现可根据具体需求来设计目标函数。
VRP 还有很多拓展,比如取货送货(顾客们有收发两种需求)、多车型、多仓库等等,还可以跟其它组合优化问题结合,如三维装箱、选址、库存管理等等。
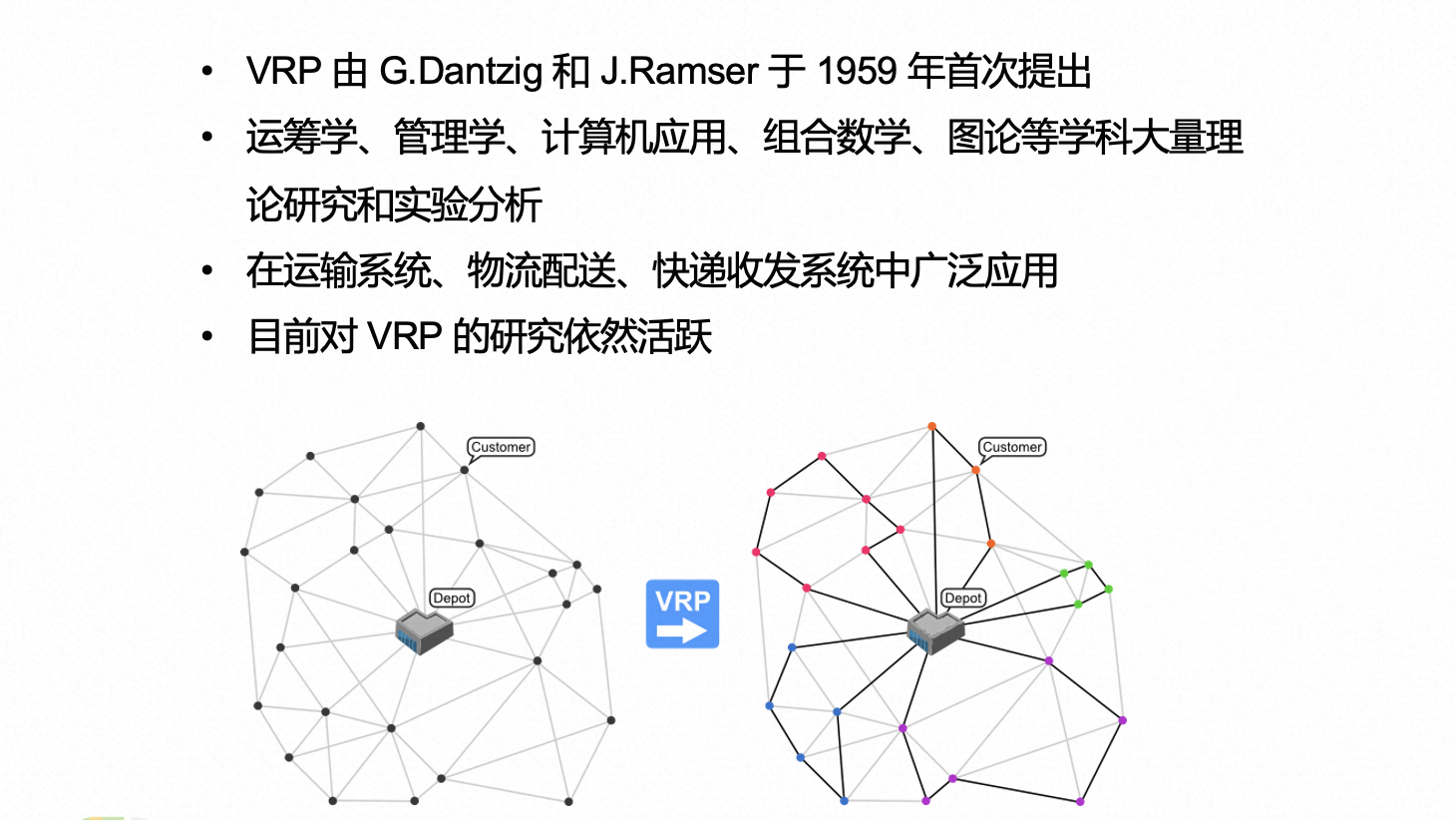
VRP 是 1959 年由 G.Dantzig 和 J.Ramser 两位数学家首次提出,很快就引起了运筹学、管理学、计算机应用、组合数学、图论等学科专家的高度重视,他们对此进行了大量理论研究和实验分析,取得了很大的研究进展,其研究成果在运输系统、物流配送系统、快递收发系统中已得到广泛应用,现在对 VRP 的研究仍然相当活跃。
其中丹齐格被称为线性规划之父,和冯诺依曼都是数学规划的创始人,运筹学中的单纯形法就是他发明的。
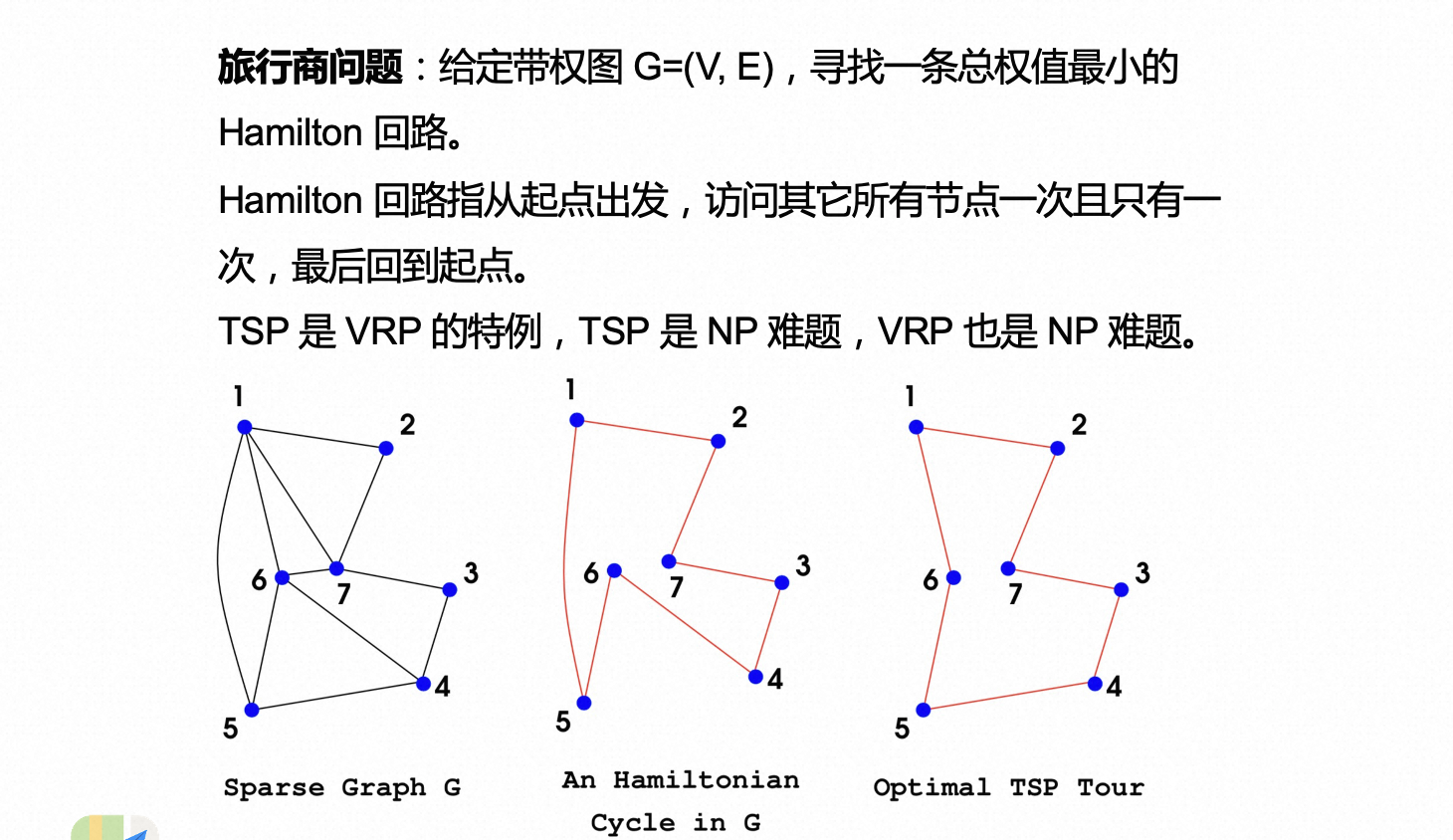
之前大家了解最多的应是旅行商问题,官方定义是,给定带权图 G=(V,E),V 是顶点,E 是边,边带权重,求解一条最权值最小的哈密顿回路,哈密顿回路指从起点出发,访问其它所有节点一次且仅有后,再返回起点。可以说是给定一系列城市和每对城市之间的距离,求解访问每一个城市一次并回到起始城市的最短回路。
下面最左边是个稀疏图,并不是每两个顶点之间都有边相连,这里边是有权重的,只是没有标示;中间图是其中一个哈密顿回路,右图是最优的 TSP 路径。
由上图可知 TSP 其实是 VRP 的一个特例,一个最简单版的 VRP,没有容量、时间窗等的约束,任意一辆车都能装载所有货物然后运到所有网点。
所以在解 TSP 问题时,会相对简单,随意组合都是一个可行方案,虽然未必是最优。但 VRP 由于存在诸多约束,遍历组合搜索方案空间时,会遇到很多不可行的方案,难度自然大大增加。
TSP 是 NP 难题,VRP 自然也是。
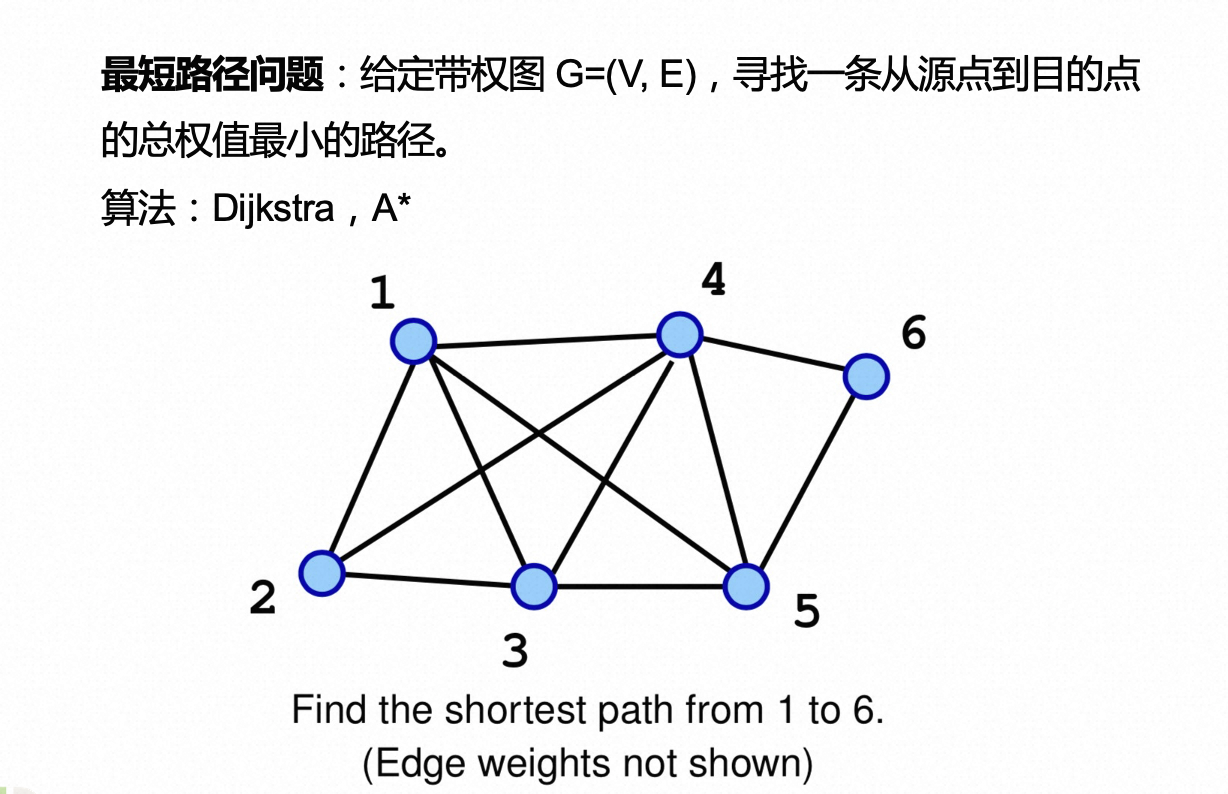
还有一个容易跟 VRP 混淆的是高德地图的路径规划,因为都是路径规划问题,但其实问题规模差别很大,高德地图的路径规划是单源路径规划,指的是在地图上寻找从源点到目的点的最短路径。没有要求必须经过所有点,更没有装载量、时间窗等约束,所以会相对简单的多,工程上也是毫秒级返回,都能得到最优解,大家用高德地图能感觉到,但 VRP 规模稍大点,分钟级的也可能只是满意解。
对于单源最短路径问题最常见的算法是 Dijkstra 和 A 星,当然还有其它的 Floyd、贝尔曼福特等,不再赘述,有兴趣可以查阅相关资料。
我们用的导航软件,从一地到另一地的最短路径问题,就是一个典型的运筹学问题。该问题目标是找到最短的驾驶路径 (或驾驶时间最短的路径),约束条件往往有单行路段以及每条路段的限速等等。
问题分析
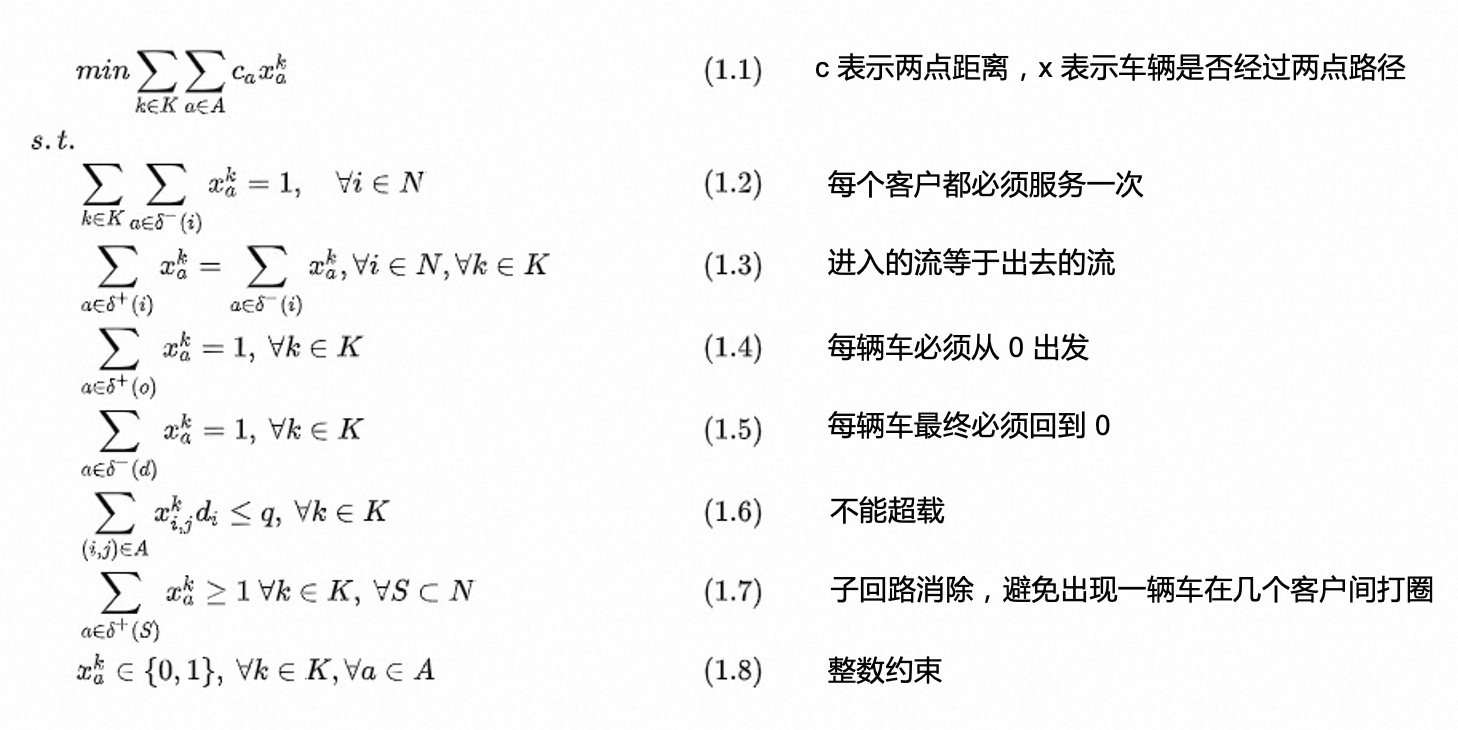
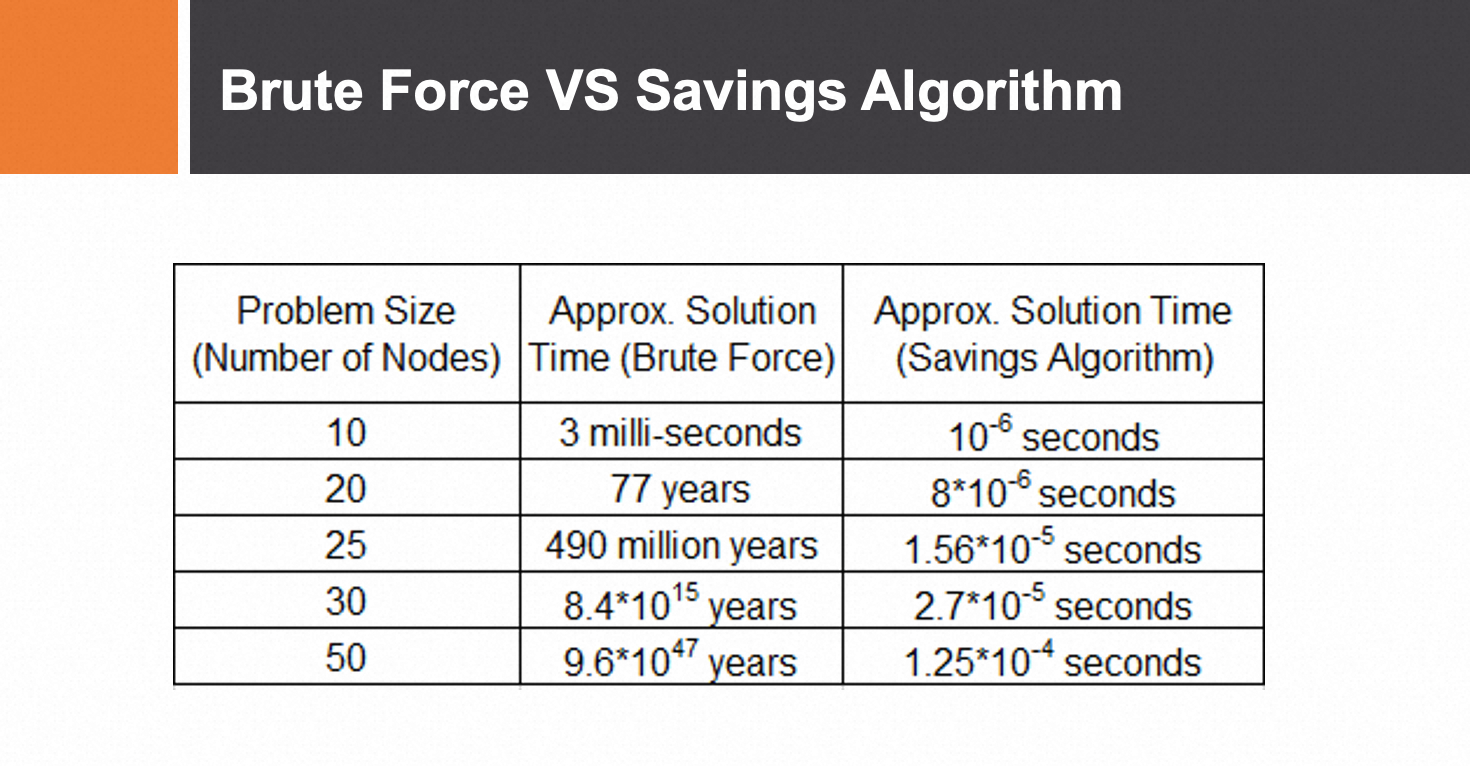
上图是有能力约束的车辆路径调度问题的数学模型。下面来感受下 VRP 暴力解的计算量。
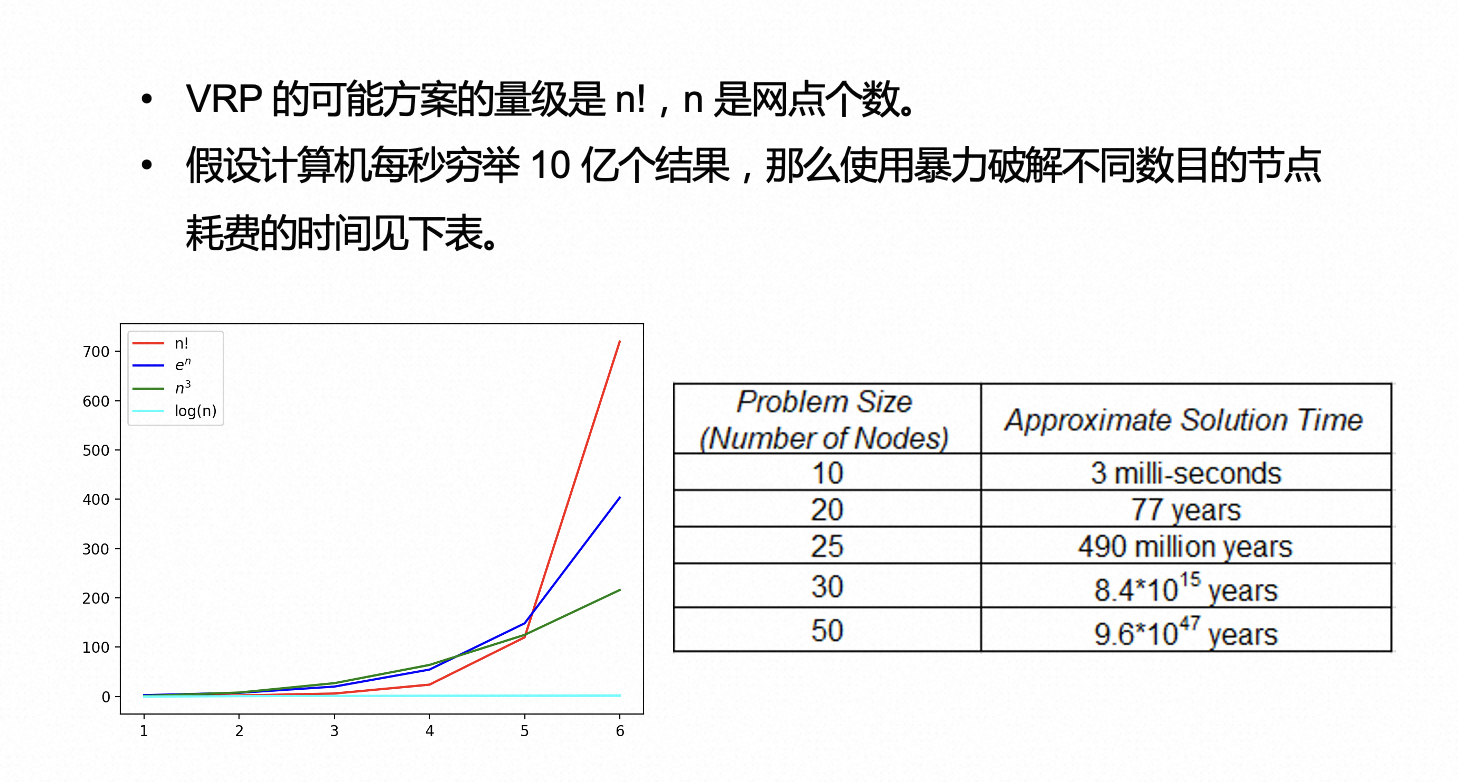
从穷举法的搜索空间来看,可以发现这个计算空间超级大,根本不可能通过增加机器来解决,再多的机器投进去也是炮灰,当然这个空间并不是完全没有秩序的,是有规律可循的,这是我们设计精确算法和启发式算法的原因,精确解其实还是探索了所有空间,只是有些空间还没搜索就发现没啥探索价值就放弃了,这就节省了很多宝贵的时间,但即使如此,当数据量大时,计算量依然极其庞大。所以才出现启发式算法,在大的空间内大量有效探索,但只能找到近似解,无法找到最优解。
算法篇
精确解
分支定界
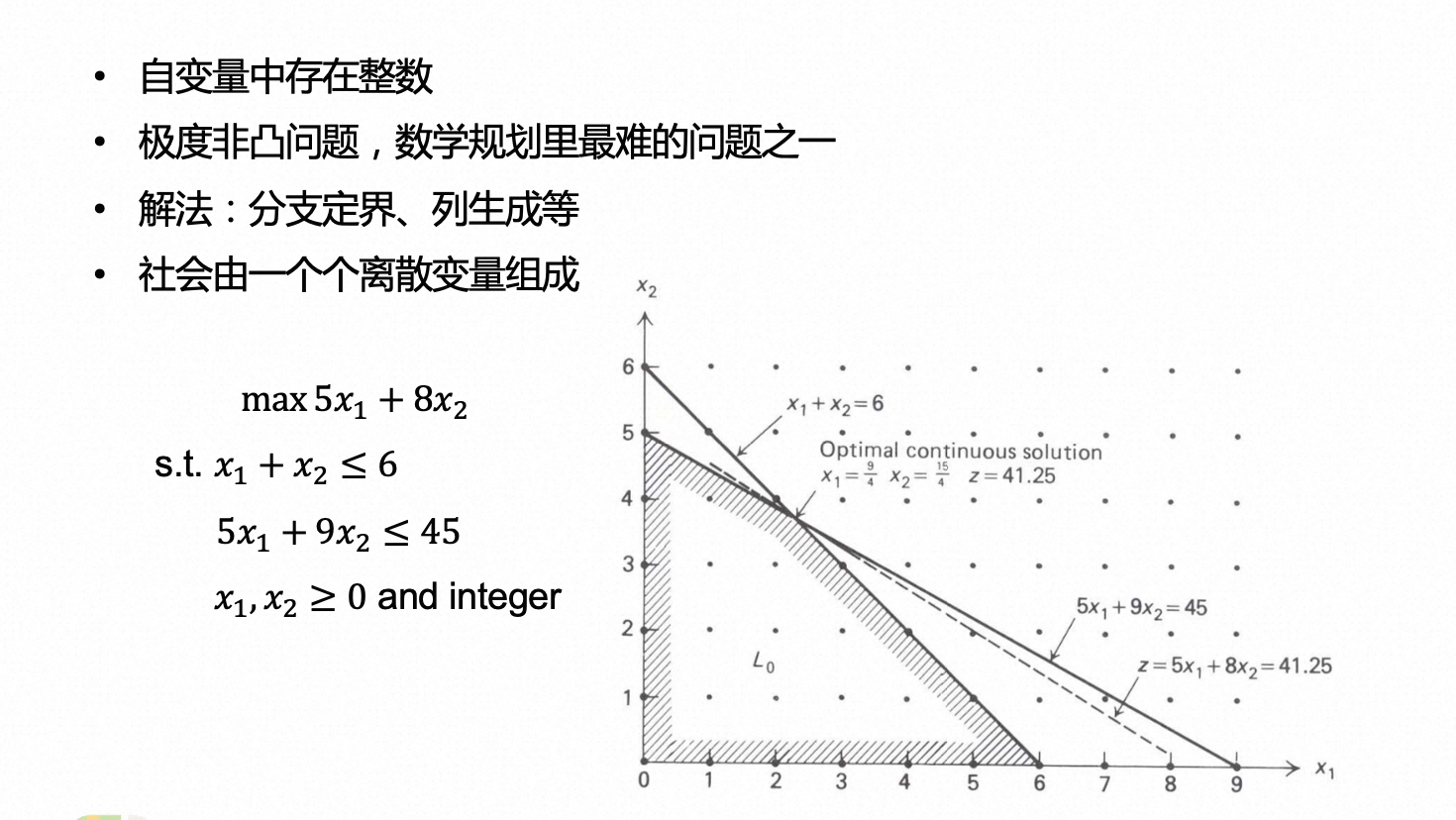
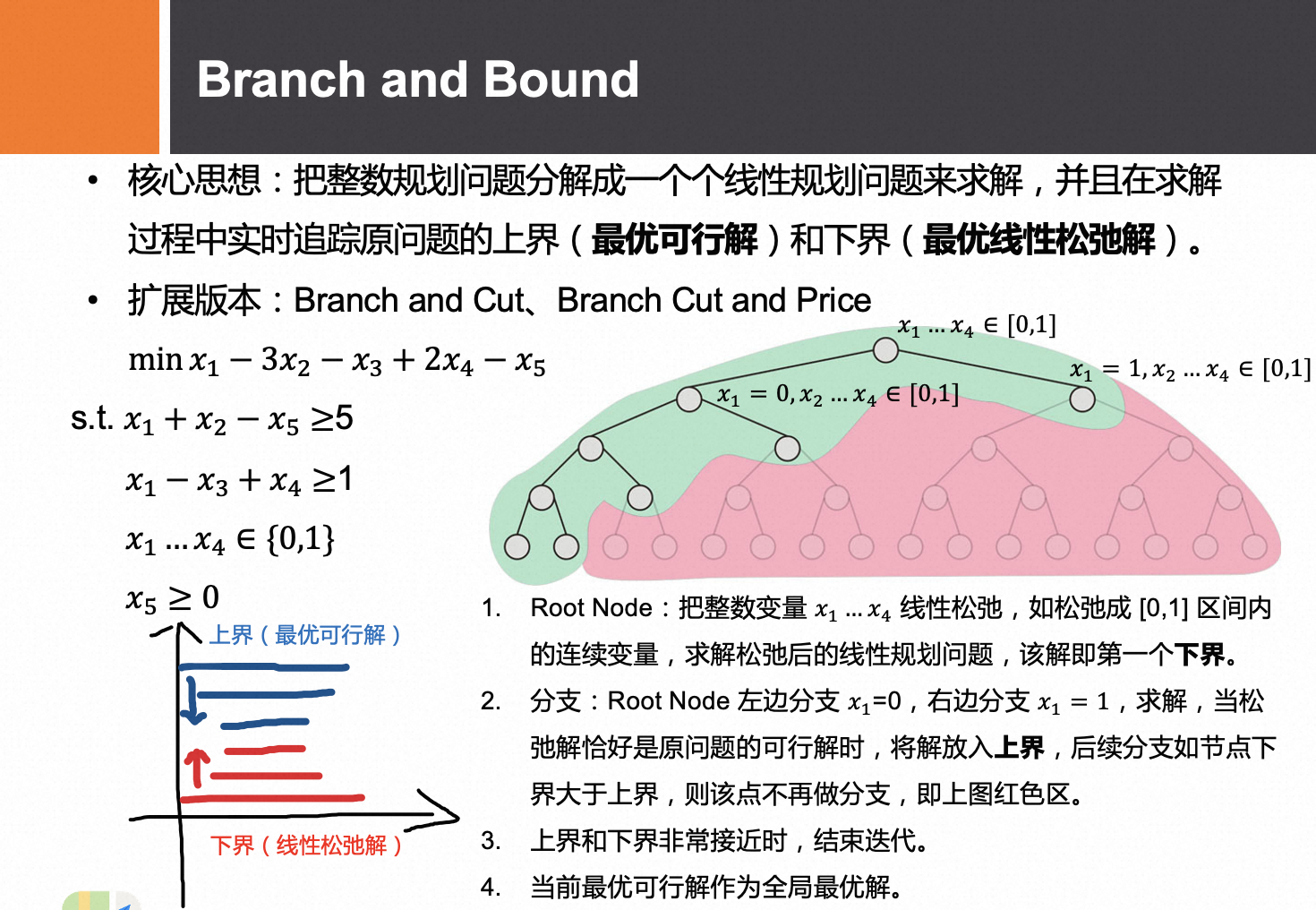
整数规划的精确算法通常需要用到分支定界法(Branch and Bound Method),以及增加分支定界效率的各种技巧,例如割平面方法(Cutting Planes Method)。总的来说,求解整数规划的精确解是NP难的,也就是指数级算法复杂度(Exponential Time Solvable)。
整数规划问题被看作数学规划里、甚至是世界上最难的问题之一,被很多其他领域(例如机器学习)认为是不可追踪(Intractable)的问题,也就是他们直接放弃治疗了。
分枝界限法是由三栖学者查理德·卡普(Richard M.Karp)在20世纪60年代发明,成功求解含有65个城市的旅行商问题,创当时的记录。“分枝界限法”把问题的可行解展开如树的分枝,再经由各个分枝中寻找最佳解。
分枝界限法也能够使用在混合整数规划问题上,其为一种系统化的解法,以一般线性规划之单形法解得最佳解后,将非整数值之决策变量分割成为最接近的两个整数,分列条件,加入原问题中,形成两个子问题(或分枝)分别求解,如此便可求得目标函数值的上限(上界)或下限(下界),从其中寻得最佳解。
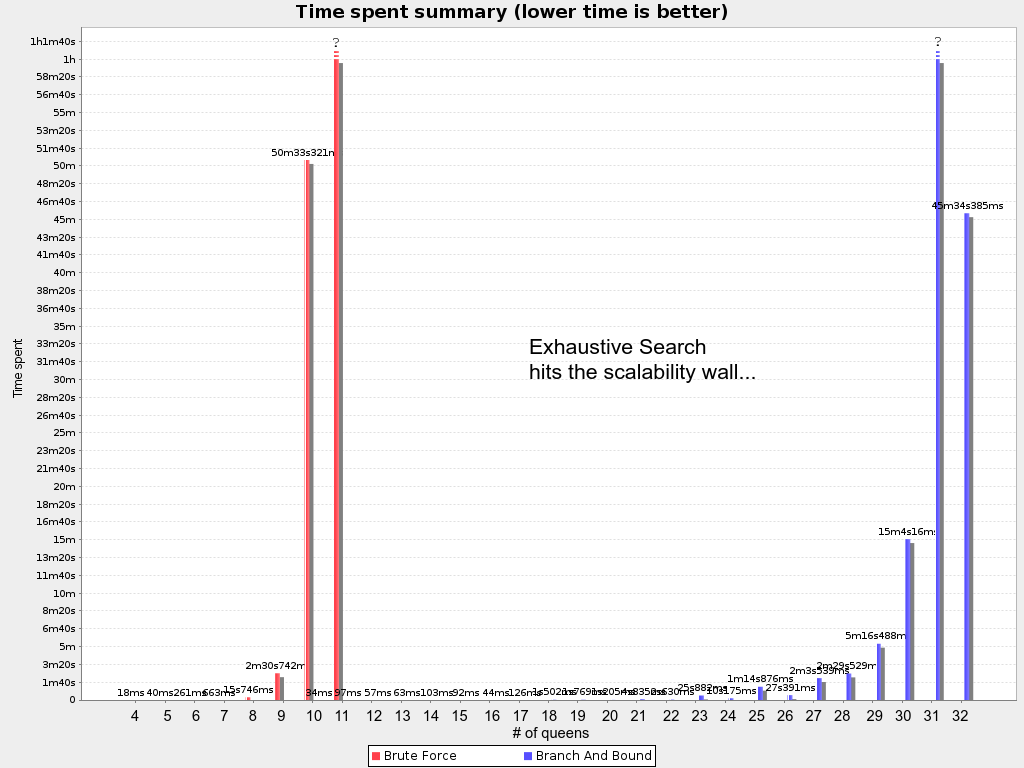
总的说来,精确性算法基于严格的数学手段,在可以求解的情况下,其解通常要优于人工智能算法。但由于引入严格的数学方法,计算量一般随问题规模的增大呈指数增长,因而无法避开指数爆炸问题,从而使该类算法只能有效求解中小规模的确定性VRP,并且通常这些算法都是针对某一特定问题设计的,适用能力较差,因此在实际中其应用范围很有限。
近似解
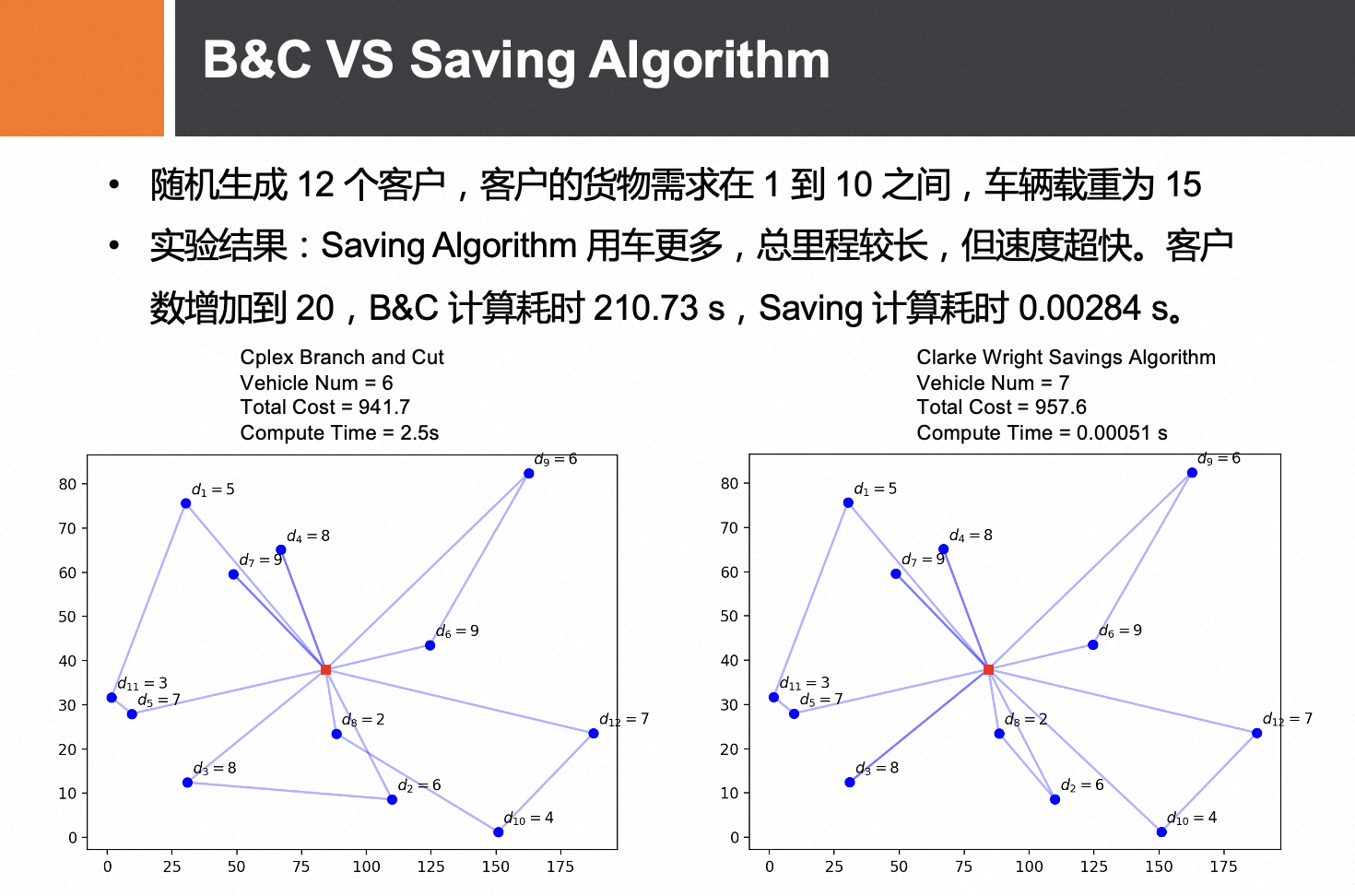
近似解的思想为通过一系列启发式的规则来构造和改变解,从而逐步提升解的质量。对于VRP而言,较为经典的启发式算法为Clarke-Wright算法等。此外,经过不断的探索研究,元启发式算法被证明在求解VRP方面具有很好的效果和效率。一些经过精心设计的元启发式算法,例如模拟退火、禁忌搜索、遗传算法、蚁群算法、变邻域搜索、自适应大规模邻域搜索算法等在求解VRP上有着非常好的表现。
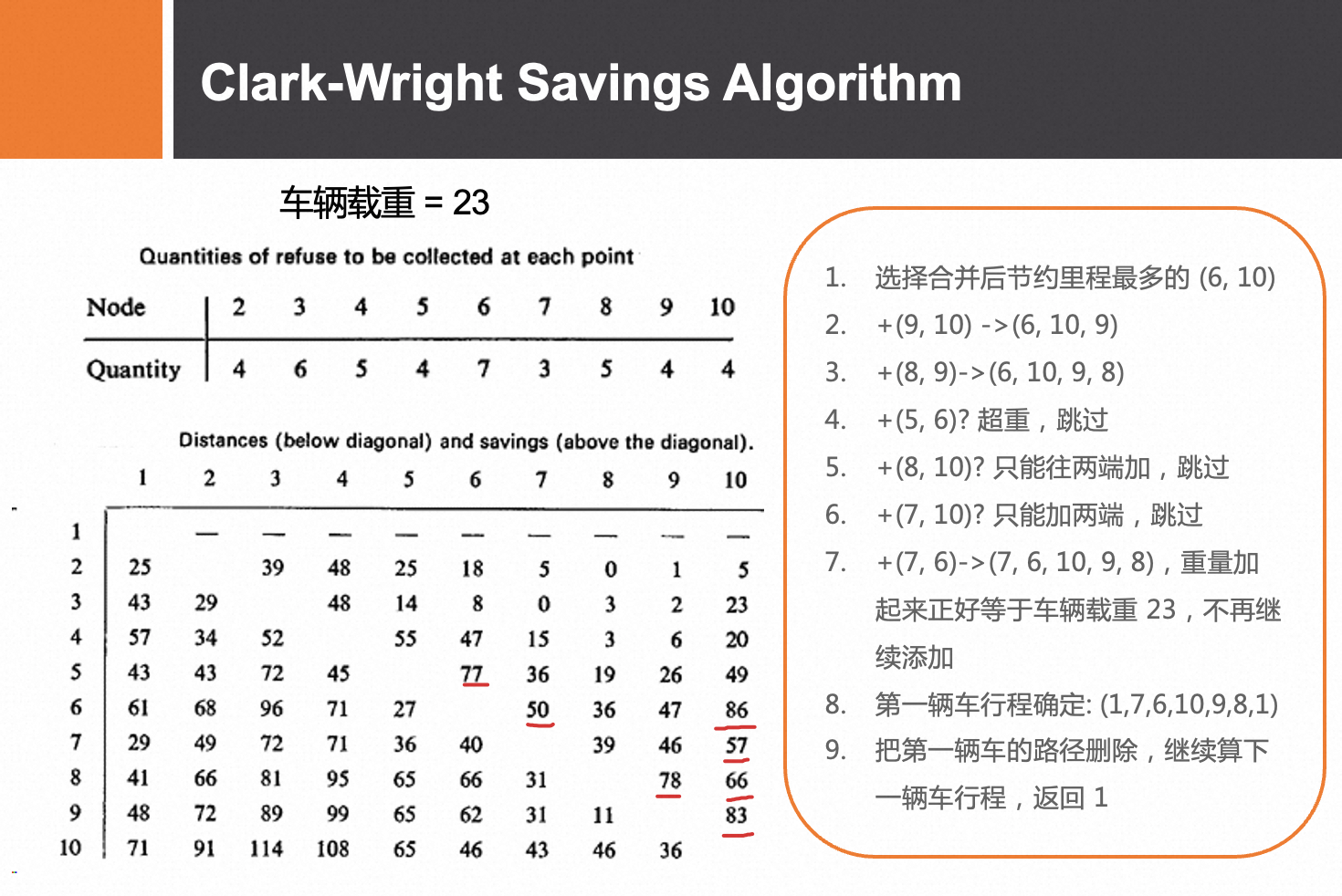
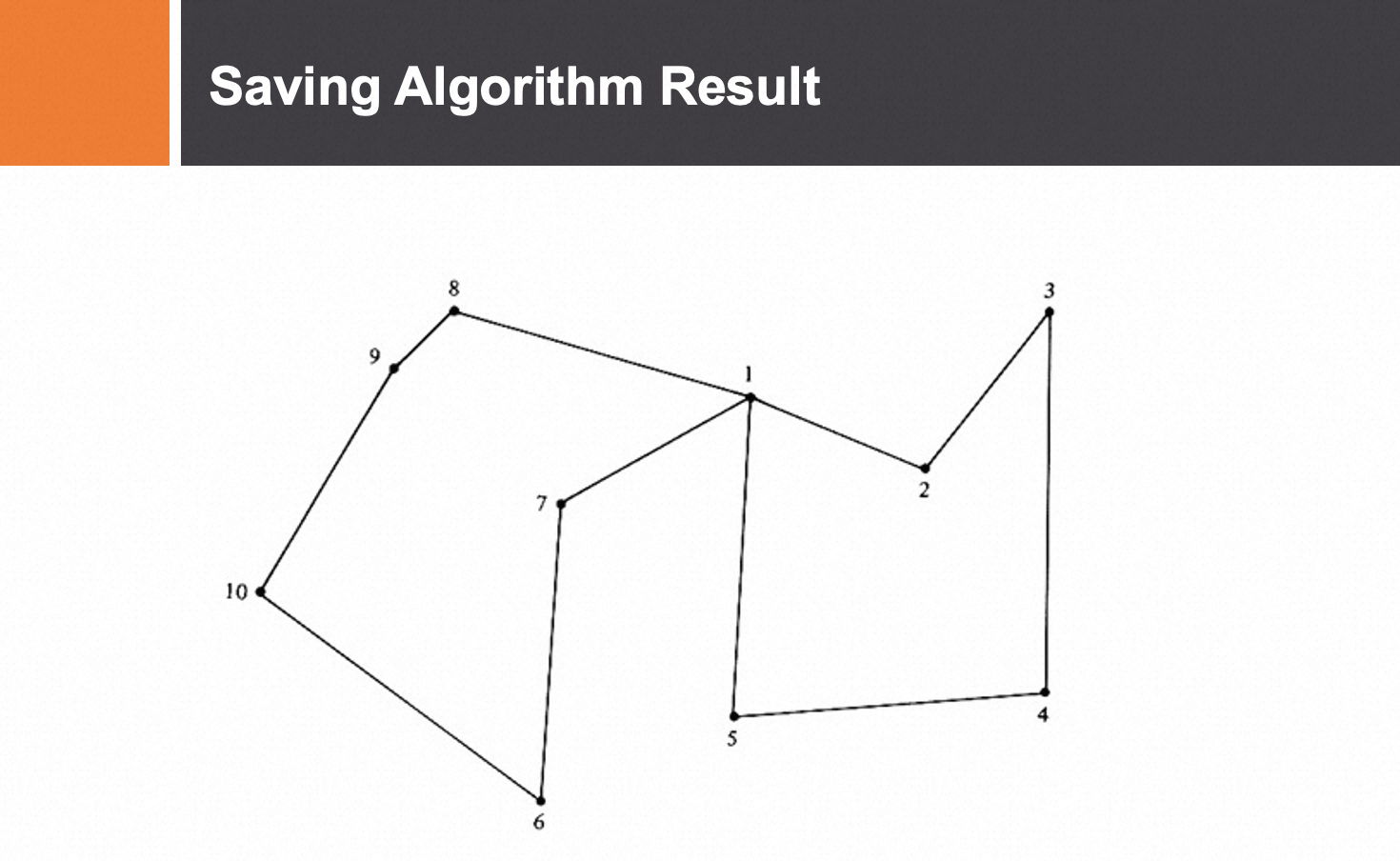
节约法
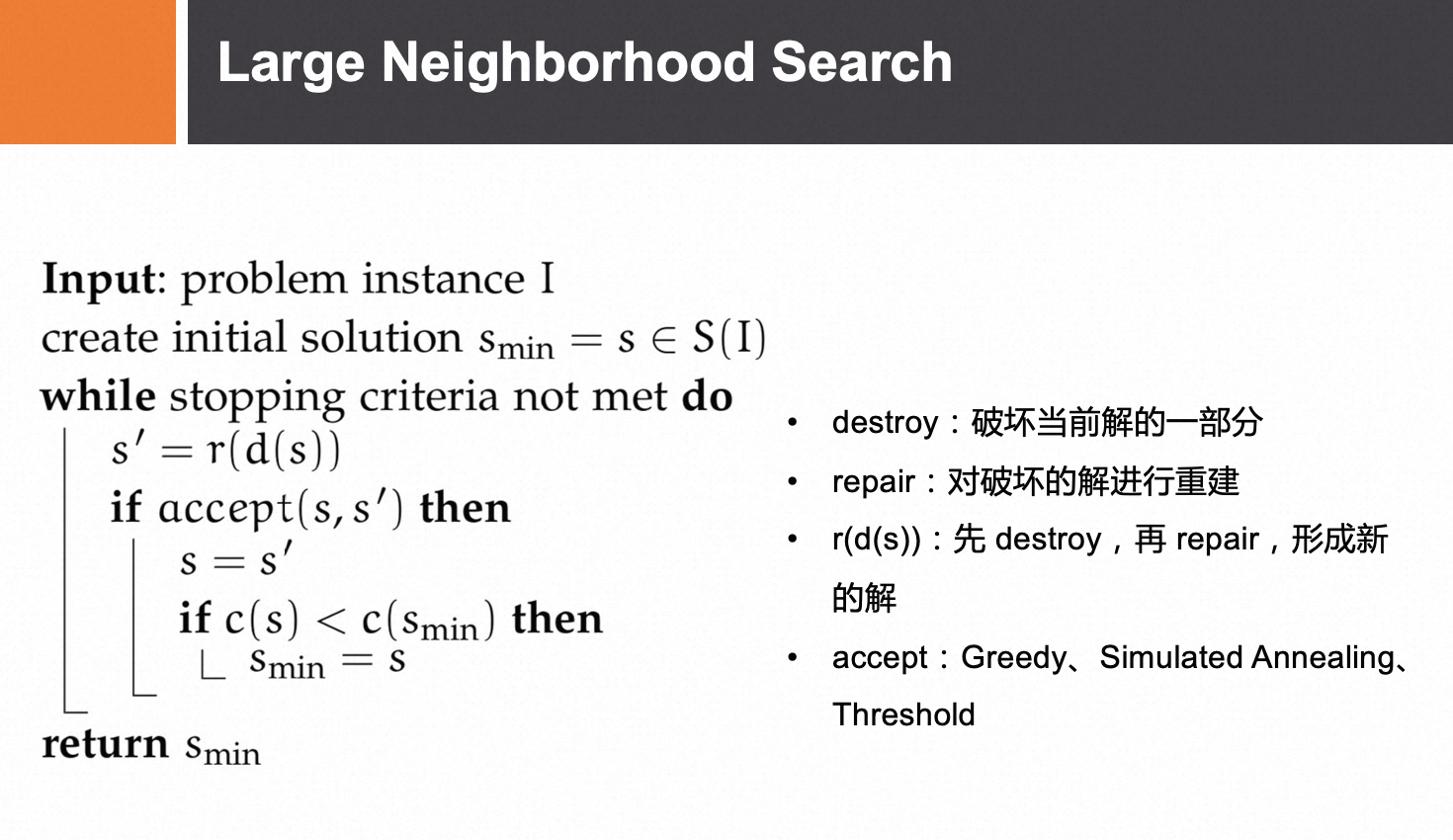
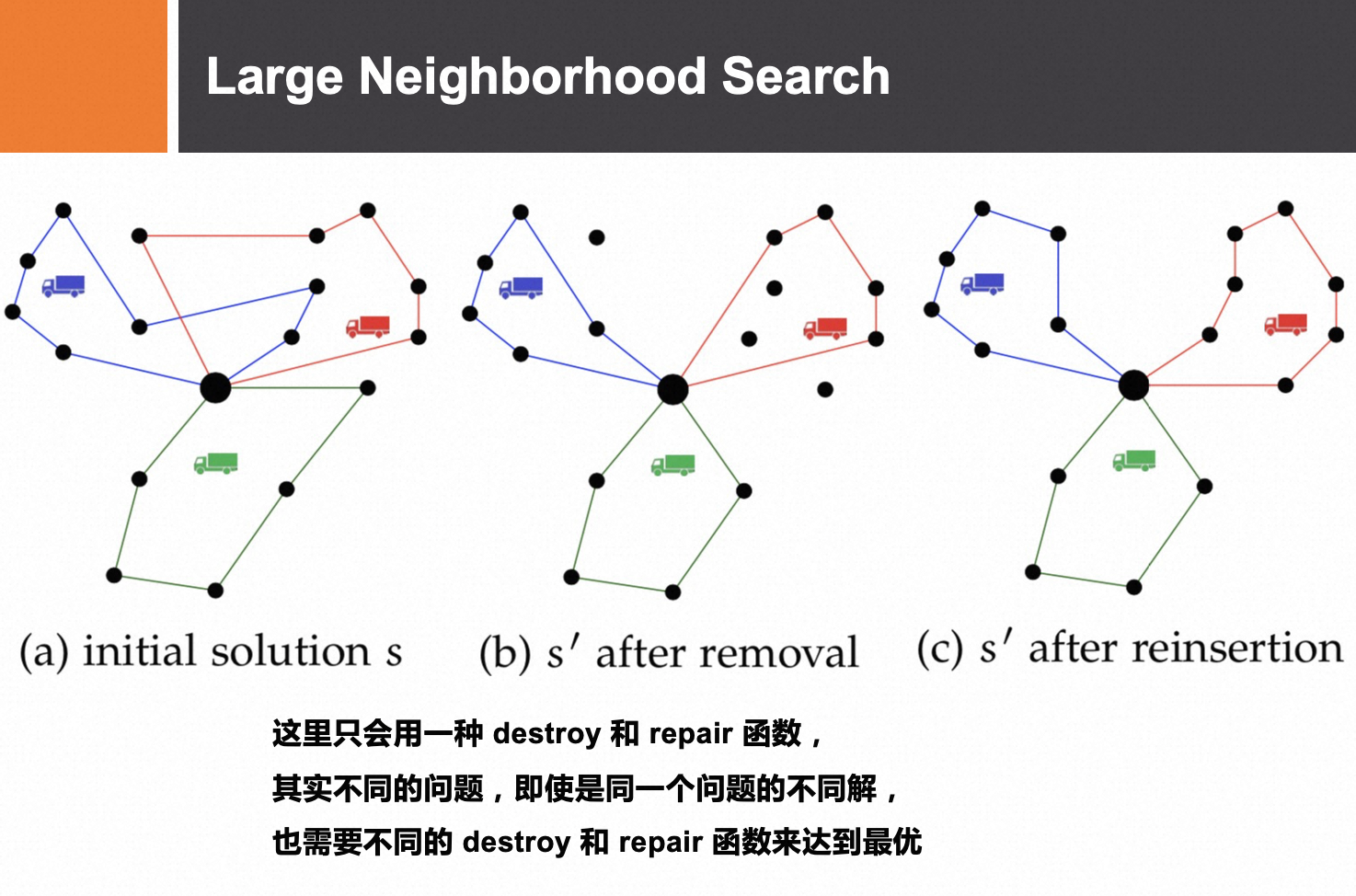
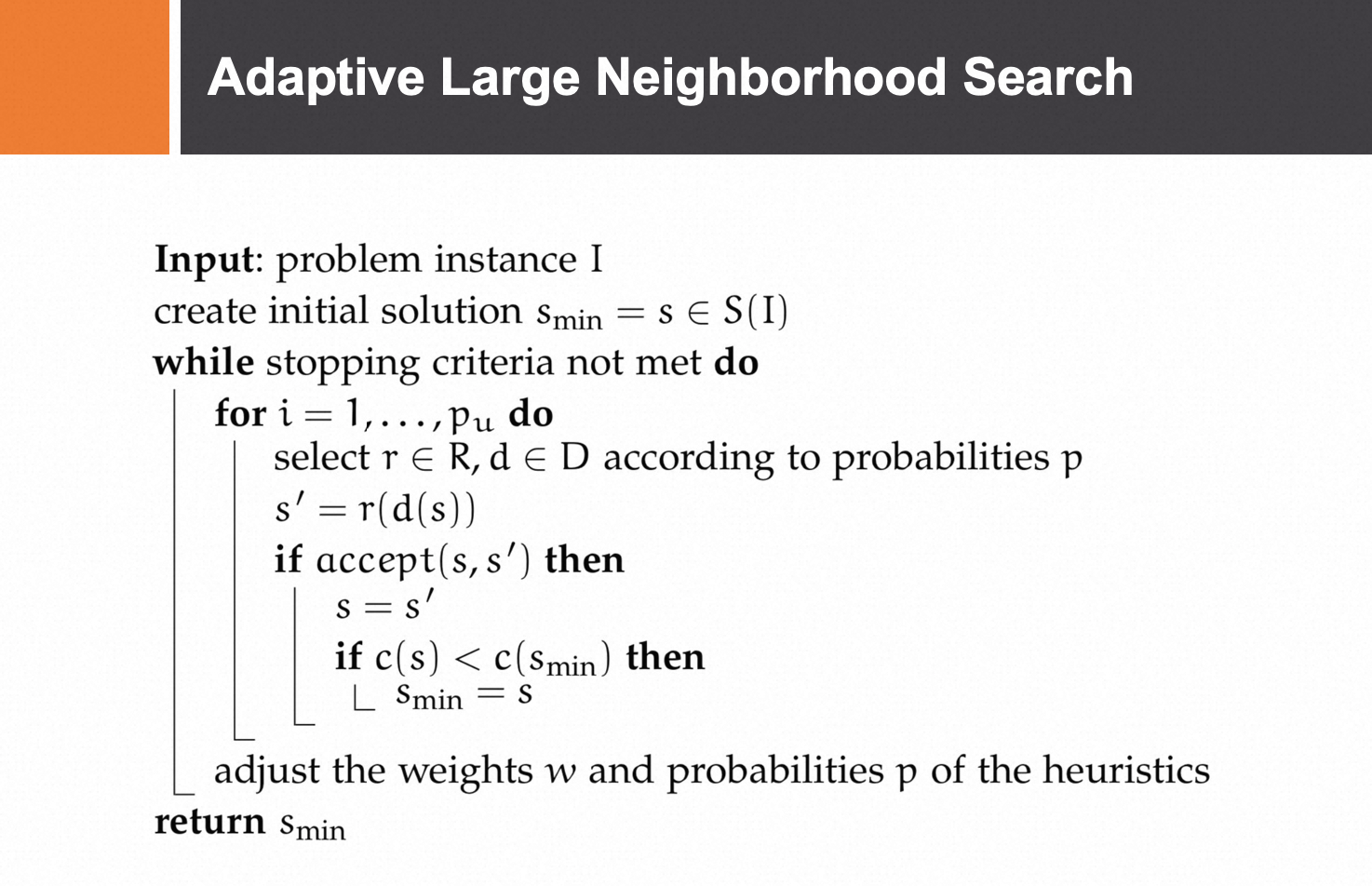
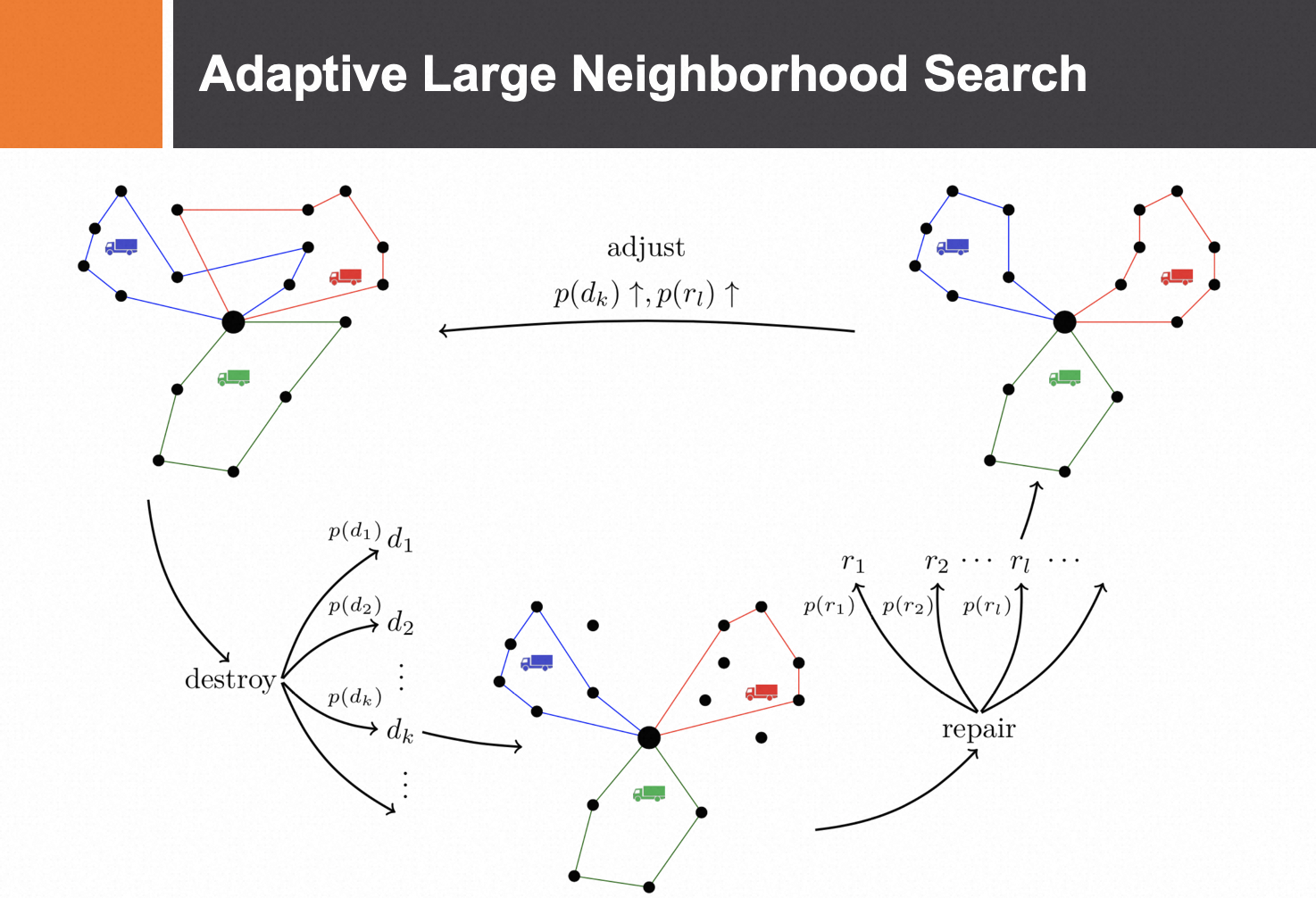
自适应大规模邻域搜索


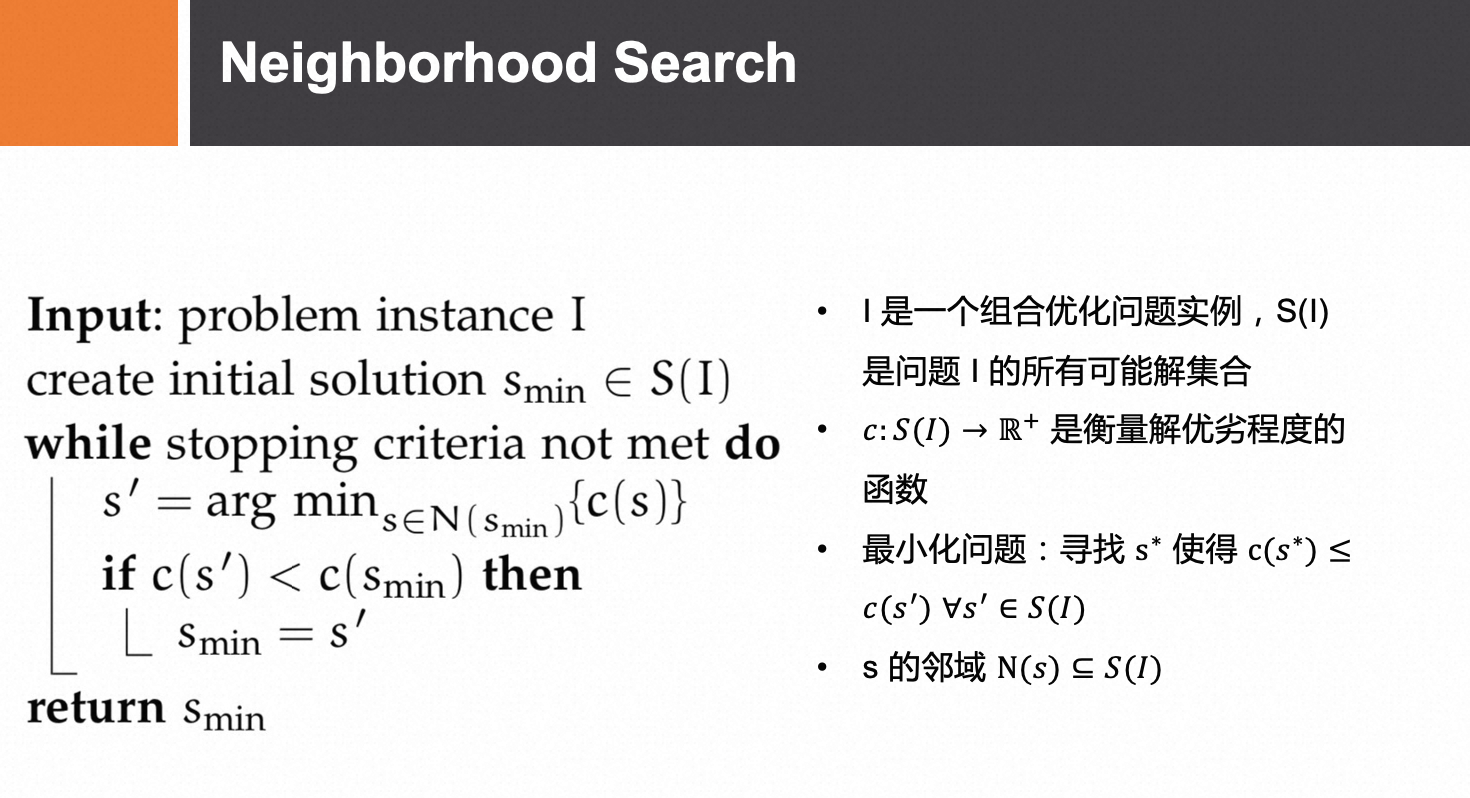
所谓邻域,简单说就是给定点附近其它点的集合。在距离空间中,邻域一般被定义给以给定圆点为圆心的一个圆。在组合优化问题中,邻域就是指对当前解进行一个操作(这个操作称为邻域动作)可以得到的所有解的集合。邻域的本质区别在于邻域动作的不同。

工具篇
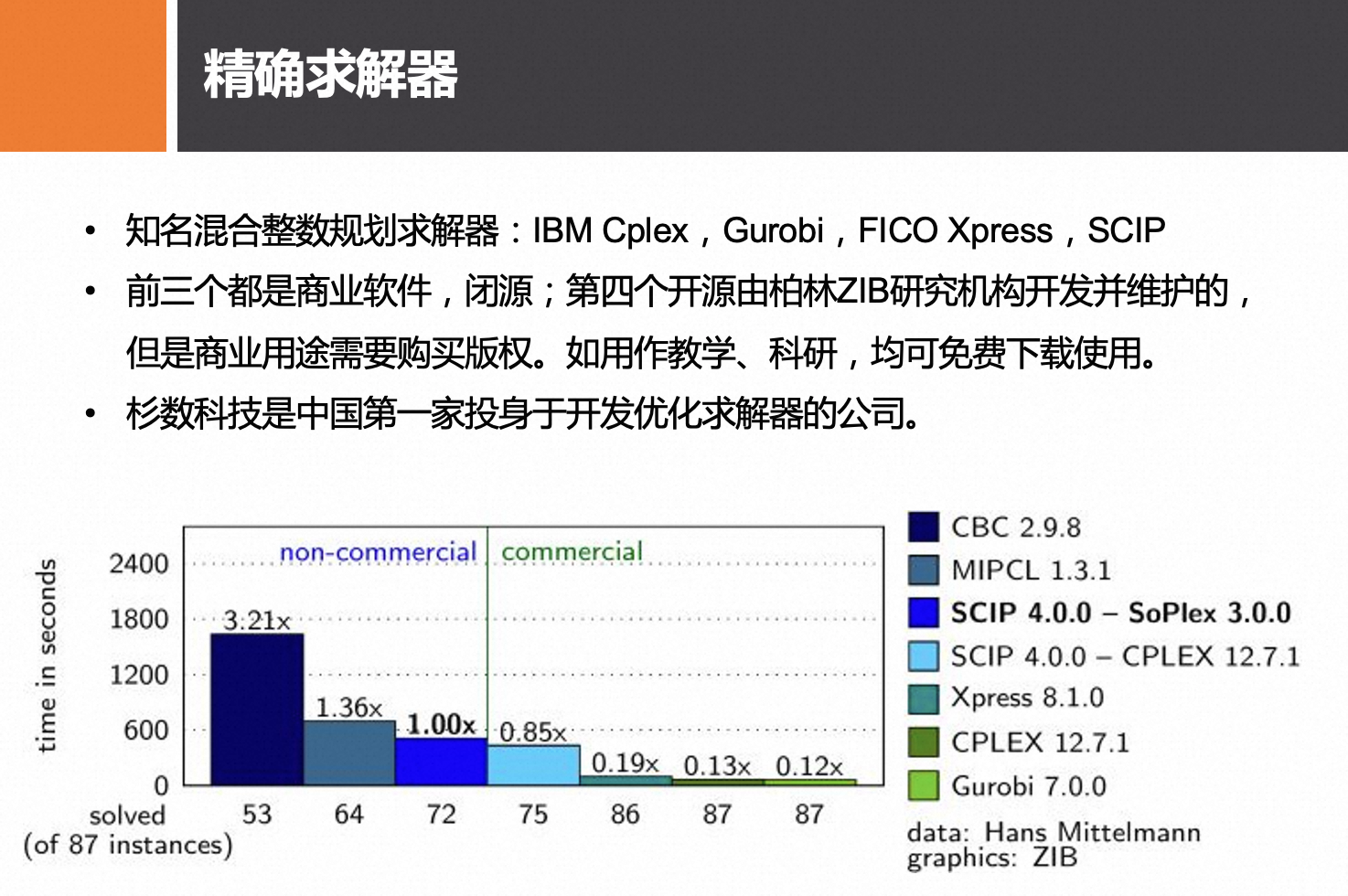
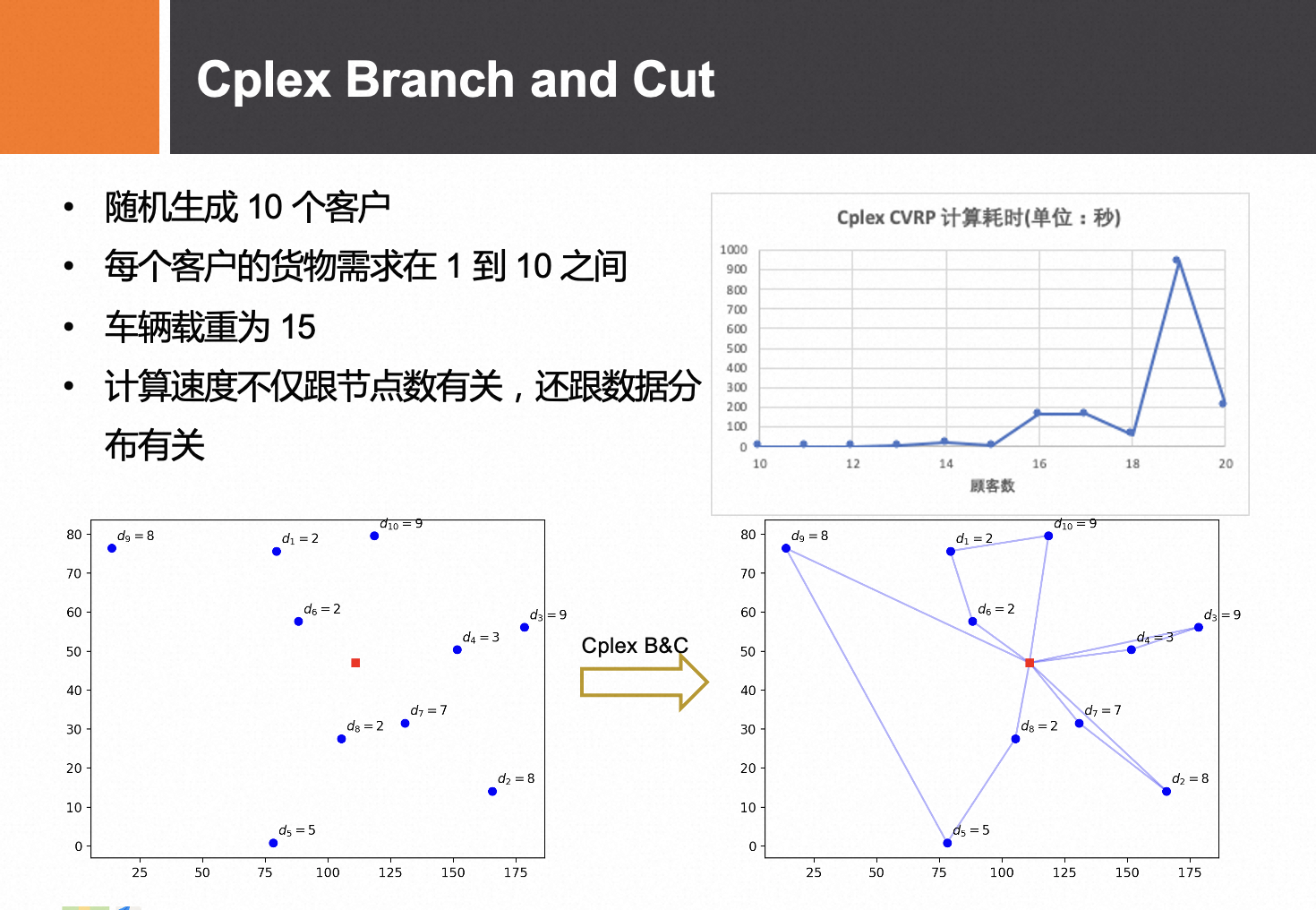
作为运筹学的引擎,优化求解器意义重大,因为所有混合整数规划模型的求解,都需要靠它。由于是NP难问题,求解的效率至关重要,不同求解器的求解速度也千差万别。例如同一个问题,用Cplex求解只需1分钟,用SCIP可能就需要1小时,你自己写B&B算法的程序,可能需要1天!(上图是各求解器效率对比)
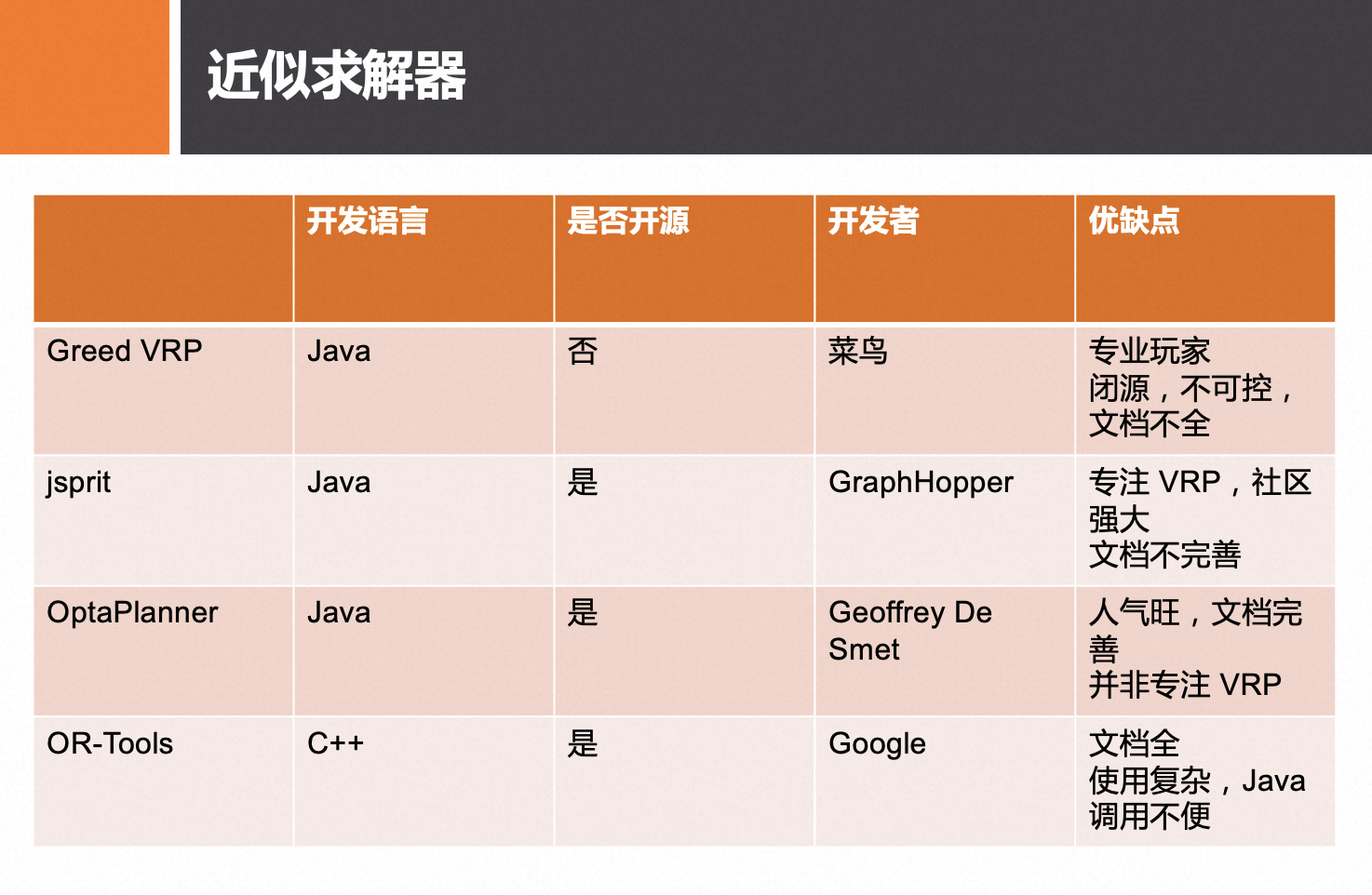
注:VRP 算法工具很多,此处仅列举 Top 部分
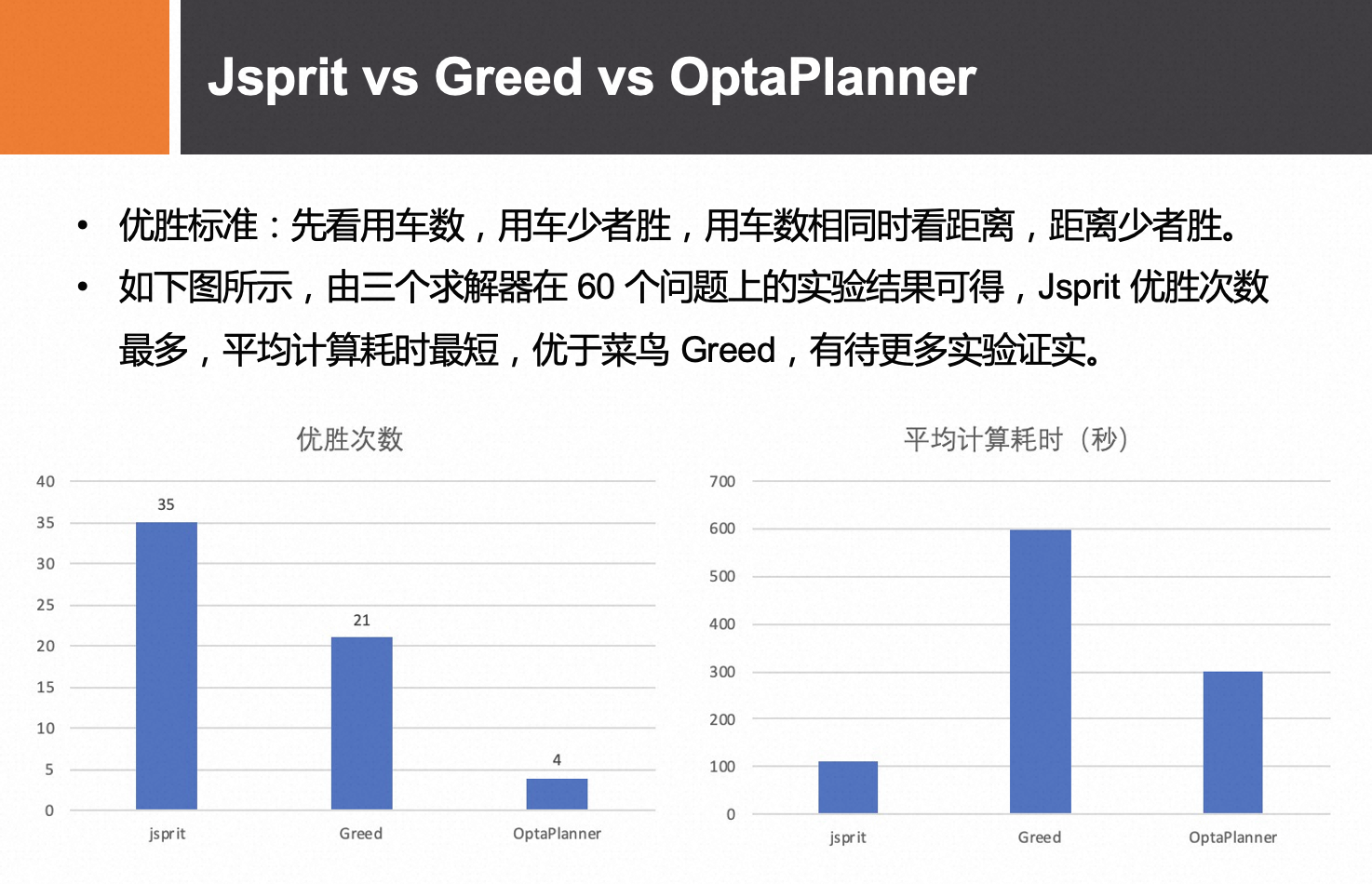
**注:以上为 2019 年 10 月在个人 mac 上的实验结果,各家版本更新后效果如何读者可做实验 **
参考文献
- The Truck Dispatching Problem
- The vehicle routing problem- State of the art classification and review
- Adaptive Large Neighborhood Search
- Branch and Bound Algorithms—Principles and Examples
- A general heuristic for vehicle routing problems
- Large neighborhood search
- The Pickup and Delivery Problem with Time Windows- an Adaptive Large Neighborhood Search heuristic